


「FLL」、「WRO」、「ロボカップ」の3つが小中学生が出場できる三大ロボット競技大会と言われているそうだ。今年は国際的なロボット競技大会「WRO2017」に挑戦することにした長男。昨年まで出場していた「FLL(ファーストレゴリーグ)」はロボット競技だけではなく、社会問題を解決するためのプロジェクトのプレゼンテーションやチーム活動をPRするコアバリュー、ブース制作など、ロボットゲーム以外のチームでの総合力を評価されるのに対して、「WRO」はほぼ純粋なロボットゲーム。全国大会以上では、ロボットゲームとは別にどのようなロボットを作ったのかをプレゼンする審査も別途あるものの、ロボット競技での獲得点数が順位を決める全て。東京予選会ではプレゼンシートの提出は求められていなかったけど、長男はロボットと未来研究会のこども研究員。大会がどうであれ、自分の研究した記録を残して、研究成果としてしっかり発表できる準備も進めてきた。それが、この資料。
■ロボットの特長

ロボットには、タイヤ用のモーターを2個使っていて、ライントレース用にカラーセンサーを2個、動物認識用に超音波センサーを左右に2個、ブロックの輸送用に左右2個設置しています。
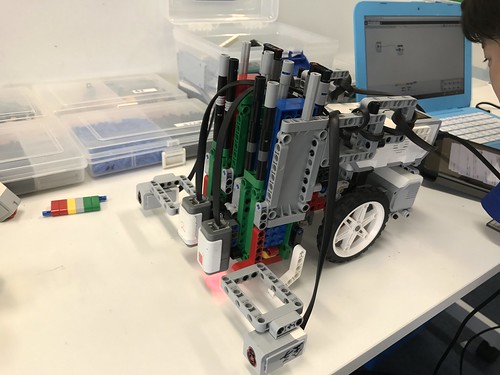
動物認識のためのセンサーは、カラーセンサーと超音波センサーの2種類を試して、ロボットの位置が多少ずれても測定誤差の少ない超音波センサーの方を採用しました。
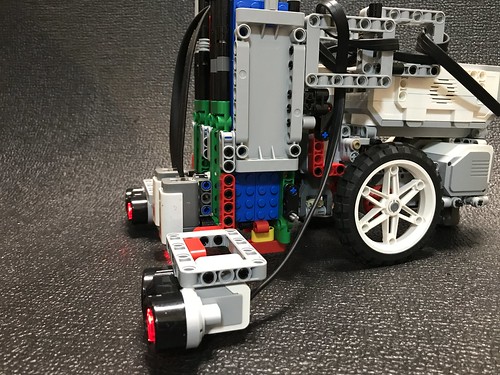
ブロックの輸送は、動物を認識してそのまますぐに落とせるように前面にできるだけコンパクトに作るように工夫しました。下に取り付けたL字型のブロックを倒している状態から起こして、L字型のブロックに引っ掛けてまた倒した状態にして押し出す仕組みになっています。
■プログラムの工夫
条件分岐プログラムで、動物までの距離を計測して、センサーで認識した数を判断し、落とすブロックの種類やパターンを制御するようにしました。
センサーによる距離計測を何パターンも試行し、条件分岐のしきい値を設定しました。

ロボットの動きは、誤差を補正するために壁合わせを基本に最小限のものとし、必要に応じてライントレースで補正して、確実に得点を獲得できるようにしました。
最新情報をお届けします
Twitter でタイログをフォローしよう!
Follow @tailoger