

FLL(ファーストレゴリーグ)に挑戦中に長男はチームのロボットエンジニア。
ロボット制作の流れは、予め決められたミッションを達成させるという「目的」に対して、どのようにそれを実行するかの「アプローチ」を考えて、アプローチにあわせたロボット本体の「ハード」を作り、それを動かす「プログラム」を作る。それを何度も「試行錯誤」する。
そもそもミッションも1つではなく難易度にあわせて得点が細分されているので、制限時間内にどのミッションをどの順番で実施するのかも自分たちで決める。それにあわせてロボット制作の目的も変わるし、そのアプローチ方法だって1つではない。正解もない。

まずはアプローチに向けて、ロボットのハードを作って頭の中で動かしてみる。
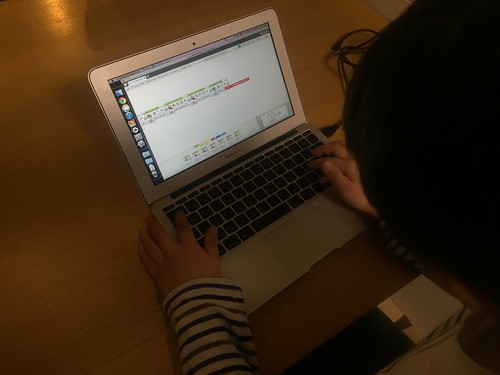
その後は、頭の中で作ったロボットの動きを実現するためのプログラムを作る。
プログラムをロボットにインストールして思い通りの動きになっているか確認。
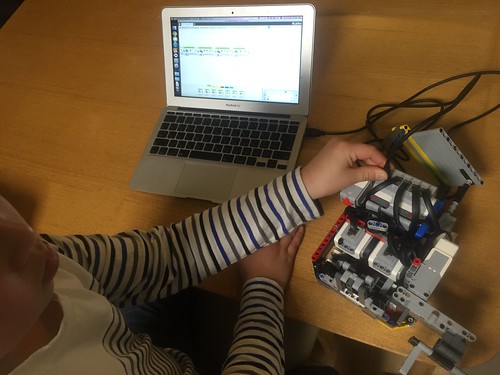
実際に動かしてみて思い通りに動くか確認。動かなければ、プログラムがあっているのか、ハードに問題がないか見極める。ハードを少しでも変えたらプログラムも変えなければならない。複雑な動きになればなるほど、最初から上手くいくことはない。フィールドを走るので毎回毎回全く同じ動きができる訳でもない。誤差も発生する。モーターだけでなく、カラーセンサーやタッチセンサー、赤外線センサーをうまく使って、少し動きがずれてしまってもリカバリーできるように冗長性も必要。まさに「試行錯誤」の地味な繰り返し。
先日の予選大会の成績がかなりの好成績だったので、本気で世界大会出場を目指すことになった長男たち。次の全国大会で得点アップを狙ってロボットプログラムを大幅に改良するため、研究室からでかいキット一式を家に持って帰ってきて1人で改良を重ねている長男だけど、どうしてもうまくいかないようだ。さあ、どうしようか、長男。

マインドストームEV3
最新情報をお届けします
Twitter でタイログをフォローしよう!
Follow @tailoger