

この日は長男の「ロボットと未来研究会」通年コースの中間研究発表会。入会してから半年間の学習成果をもとに与えられた課題をクリアできるように自分でロボットを作って、みんなの前で発表するというもの。途中入会の長男は、まだ1カ月しかたっていないけど、みんなに追いつくためにこの1か月間、かなりがんばった長男、見事課題クリアだ!
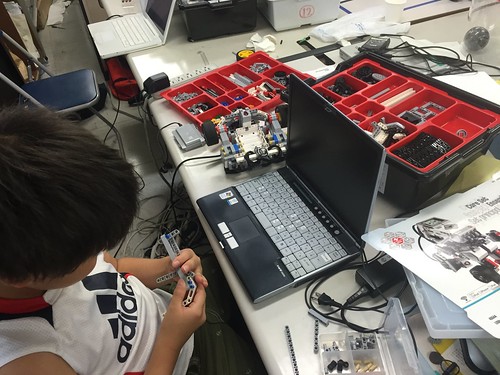
中間研究発表会で与えられた課題をクリアするために、文字通りこの5日間毎日朝から晩まで研究室に通い詰めていた長男。まるで大学の卒論や修論提出前の研究室のような雰囲気。
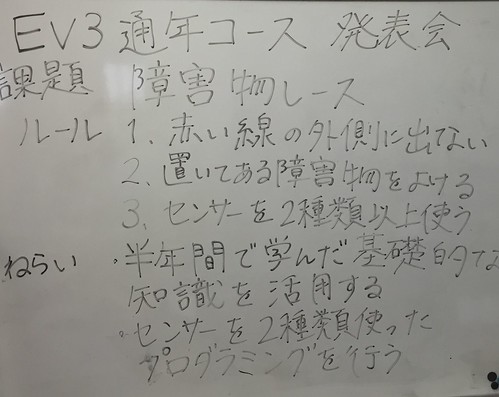
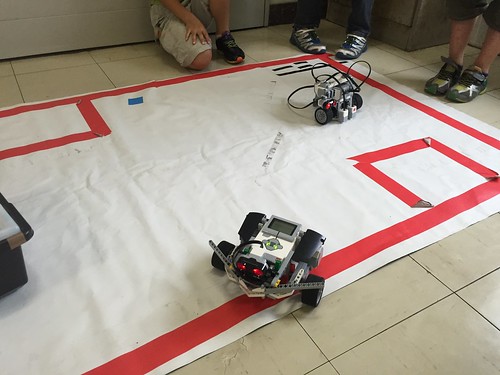
長男たちに与えられた課題は、センサーを2種類以上使って赤い線で囲まれたエリア内から出ないように障害物を避けながら進むロボットの制作だ。つまり、お掃除ロボット「ルンバ」の動きだね。
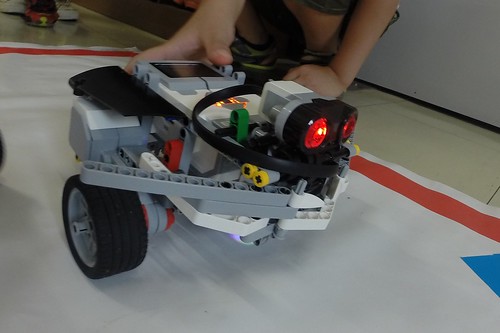
どうやらカラーセンサーでエリアを識別して赤外線センサーで障害物を感知するタイプのロボットを作ったらしい長男。
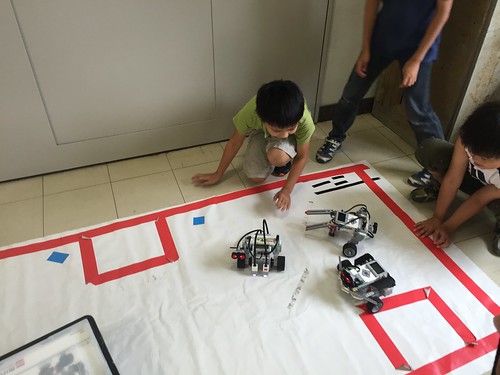
ロボットと未来研究会の活動は当然ながら子ども達が自分で考えて作ることという教育を目的としているため、誰も手伝わない。このため、でき上ってくるロボットは見た目もプログラミングによる性能もみんな全く違う。課題をクリアするため、いろんな発想やアプローチができる、それを見ることができるのも凄く面白い。
次回からは、いよいよみんなでチームを作ってFLL(世界最大規模のロボット競技大会)に挑戦することになる。楽しみだね。

マインドストームEV3
最新情報をお届けします
Twitter でタイログをフォローしよう!
Follow @tailoger